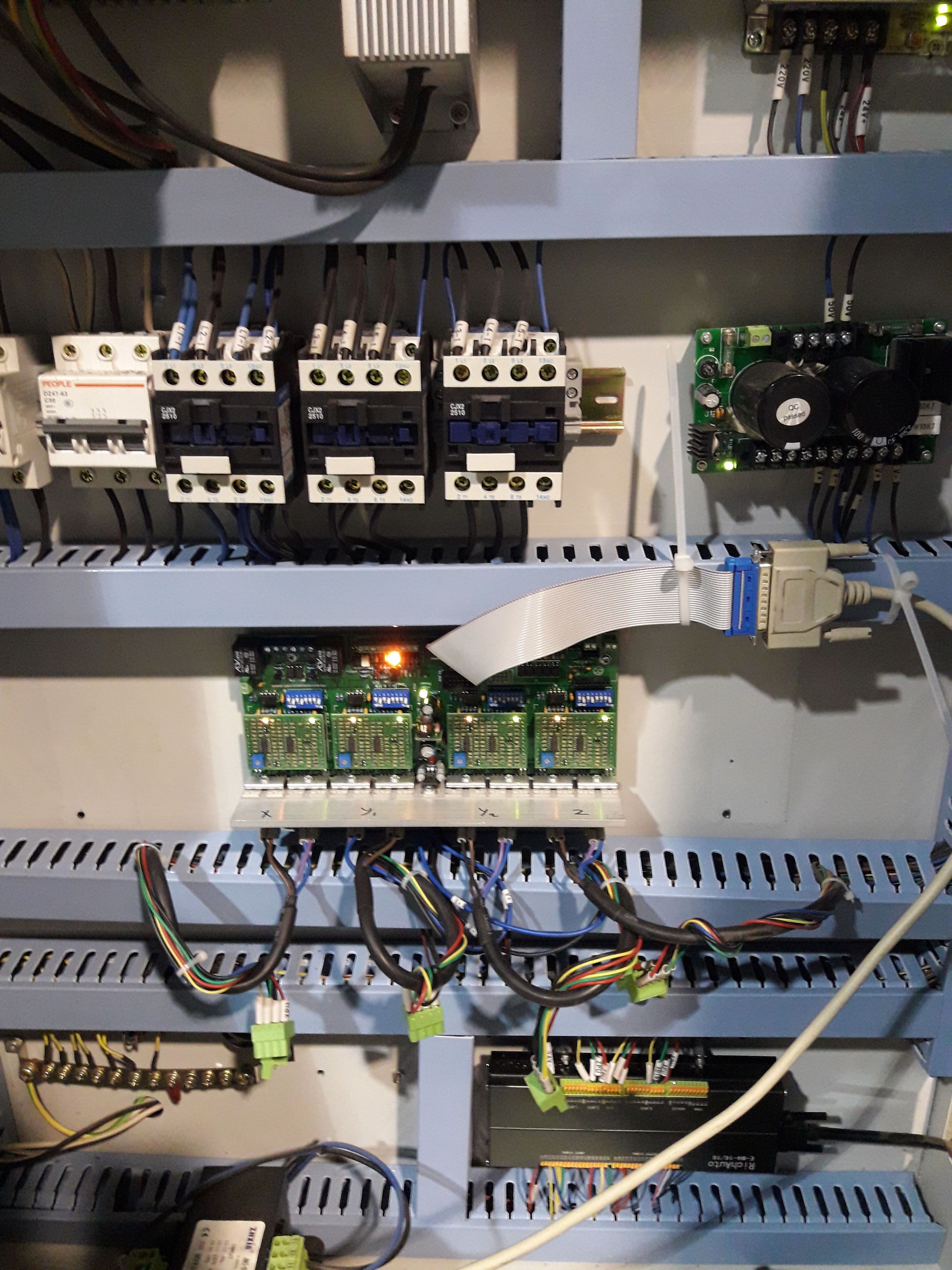
Контроллер K460_V2.3
(или коротко: К460)
К460_V2.3 - это обновленная версия контроллера после К460_V2.0 ( V2.1 / V2.2 ). Внесены некоторые изменения, которые просили сделать плазменники. Так же выведен на отдельную плату модуль преобразователя напряжения питания (20-75В в 12В). Добавлен фильтр от помех в схему модуля ШИМ-напряжение. (фото пока старые, обновлю позже)
Контроллер К460 (4 канала 7 ампер) предназначен для
управления четырьмя (4) шаговыми
двигателями 57-й, 86-й и 110-й серии (или NEMA 23, 34 и
42), при помощи специальной
компьютерной программы управления, такой как Mach3,
Turbocnc,
EMC2, Planet CNC и им
подобных.
Контроллер может работать с БИПОЛЯРНЫМИ шаговыми
двигателями или с УНИПОЛЯРНЫМИ шаговыми
двигателями, которые имеют 4 или 6 или 8 выводов. В случае с
УНИПОЛЯРНЫМИ шаговыми
двигателями, последние должны быть подключены по
БИОПОЛЯРНОЙ
схеме.
Не обязательно подключать все ЧЕТЫРЕ шаговых двигателя, можно подключать и 1 и 2 и 3 и 4 шаговых двигателя (от одного до четырех).
Шаговые двигатели имеющие 5 (пять) выводов — не будут работать с контроллером К460!!!
Технические зарактеристики:
- диапазон регулировки тока: от 1,0А до 7,0 А (дискретно, 16 значений)
- деление шага: 1/2_1/4_1/5_1/6_1/8_1/10_1/16_1/20 (8 значений, шаг 1/6 удобно использовать для винта с шагом 1,5 и 3 мм)
- напряжение питания: 20 — 75В (постоянный ток), применяется один общий источник питания возможно использовать отдельный источник питания для 4-го канала (читать в инструкции)
- ДАМЕПР уже установлен на плате (защита от обратной ЭДС с ШД)
- автоматический переход в режим удержания, через 1 сек после последнего шага, снижение тока до 70% от полного (режим можно отключить)
- полная опторазвязка LPT порта, как входных так и выходных сигналов (для сигналов Step\Dir применяется высокоскоростная оптопара HCPL2531)
- устранение среднечастотного резонанса шагового двигателя
- устранение низкочастотных вибраций (ручная подстройка)
- автоматический переход из микрошага в полный шаг (морфинг - плавный переход)
- частота ШИМ регулировки тока 25 кГц (ЦАП - 7-бит)
- контроллер работает по сигналам шаг\направление (step\ dir) мин. длина импульса шага 2 мкс (отрицательный импульс) макс. частота шагов 200 кГц
- программное включение\выключение контроллера Enable, Charge Pump (12,5 кГц) или включен постоянно
- асинхронная регулировка тока (поочередная)
- защита от короткого замыкания шагового двигателя (в обмотках двигателя между собой, обмотка двигателя на «массу», на «плюс» питания)
- защита от неправильного подключения шагового двигателя
- защита от неправильно подключения питания (контроллер не включится)
- защита от превышения напряжения питания более 78В (контроллер не включиться или выключиться если в момент работы напряжение будет превышено)
- 5 входных сигналов для подключения концевых выключателей, E-Stop, ограничителей и им подобных (можно использовать как обычные кнопки, так и индуктивные n-p-n концевые выключатели)
- 2 реле для коммутации нагрузки 220В / 5-10А (ток указан на применяемом реле, но не менее 5А)
- преобразователь ШИМ-НАПРЯЖЕНИЕ 400Гц/0-10В (опционально). Модуль ШИМ питается как от внутреннего источника 12В, так и от внешнего. Выбирается установкой джамперов питания модуля ШИМ.
- отдельный разъем для подключения внешнего вентилятора (12в)
- неиспользуемые выводы LPT порта или ненужные выводы (например реле, или ШИМ) можно вывести на отдельный разъем
- все четыре модуля на плате взаимозаменяемые
- дополнительная плата светодиодных индикаторов (включения контроллера и аварии каждого канала X Y Z A, вкл/выкл каждого канала), для вывода на переднюю панель корпуса
- размер платы: 225 х 120 х 60
- диаметр крепежных отверстий: 3,5 мм (внешний диаметр 7мм под головку винта)
Отдельное спасибо ООО "Акетон" , за предоставленные шаговые двигатели для тестирования !
Тут представлены видео и работы выполненные на предыдущей версии контроллера К460.
ВИДЕО 1 контроллер К460 с двигателями 86-й серии
ВИДЕО 2 контроллер К460 с трансформаторным блоком питания и двигателями 110-й серии
ВИДЕО 3 этот же контроллер в корпусе K460-box
Фрезеровка, контроллер К460 Фрезеровка формы метательного планера. Материал В95ПЧТ2. Приморский край, г. Находка (07/01/2017)

Пример установки контроллера К460 в корпус вместе с материнской платой, блоком питания и монитором (07/01/2017)



Сергей, г. Ставрополь, прислал фотографии станка с контроллером К460 и фотографии своих работ.













Фотографии и видео своих работ, выполненных при помощи контроллера К460, прислал Евгений, Приморский край России, г. Находка.






Чистовая обработка полоски ложемента, материал Д16Т, Контроллер К460-box + Mach3.

Фотографии контроллера К460 - самостоятельная установка платы в корпус, вместе с компьютером, прислал Антон, Челябинская обл., г Златоуст.


К460 - установка контроллера на станок WOODTEC. Замена китайских драйверов на К460. До этого станок управлялся от внешнего пульта,но клиент пожелал использовать программу MACH3 и поставить контроллер К460. Станок с ременной передачей, двигатели 86-й серии, трансформаторный блок питания. Сентябрь, 2018 год. Москва. Станок вырезает узоры на латуне.






Очередные работы прислал Сергей, г.Москва. Вот такие дверцы для иконы (будет еще центральная часть) и статуэтки он сделал при помощи контроллера К460, на самодельном станке и на самодельной поворотной головке. А так же, вырезание таблички на дюралевой плите для маслоизготовительного завода.








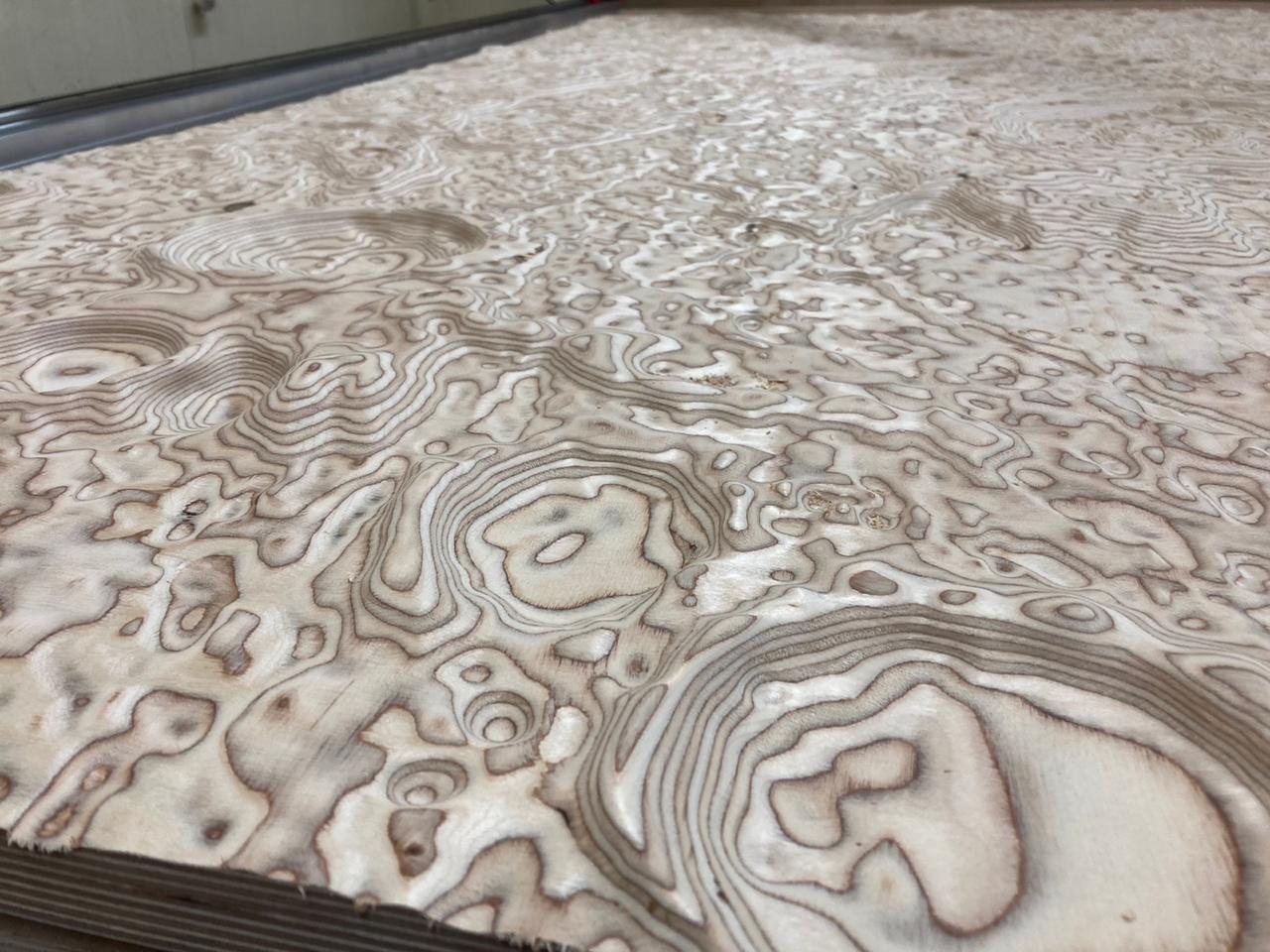
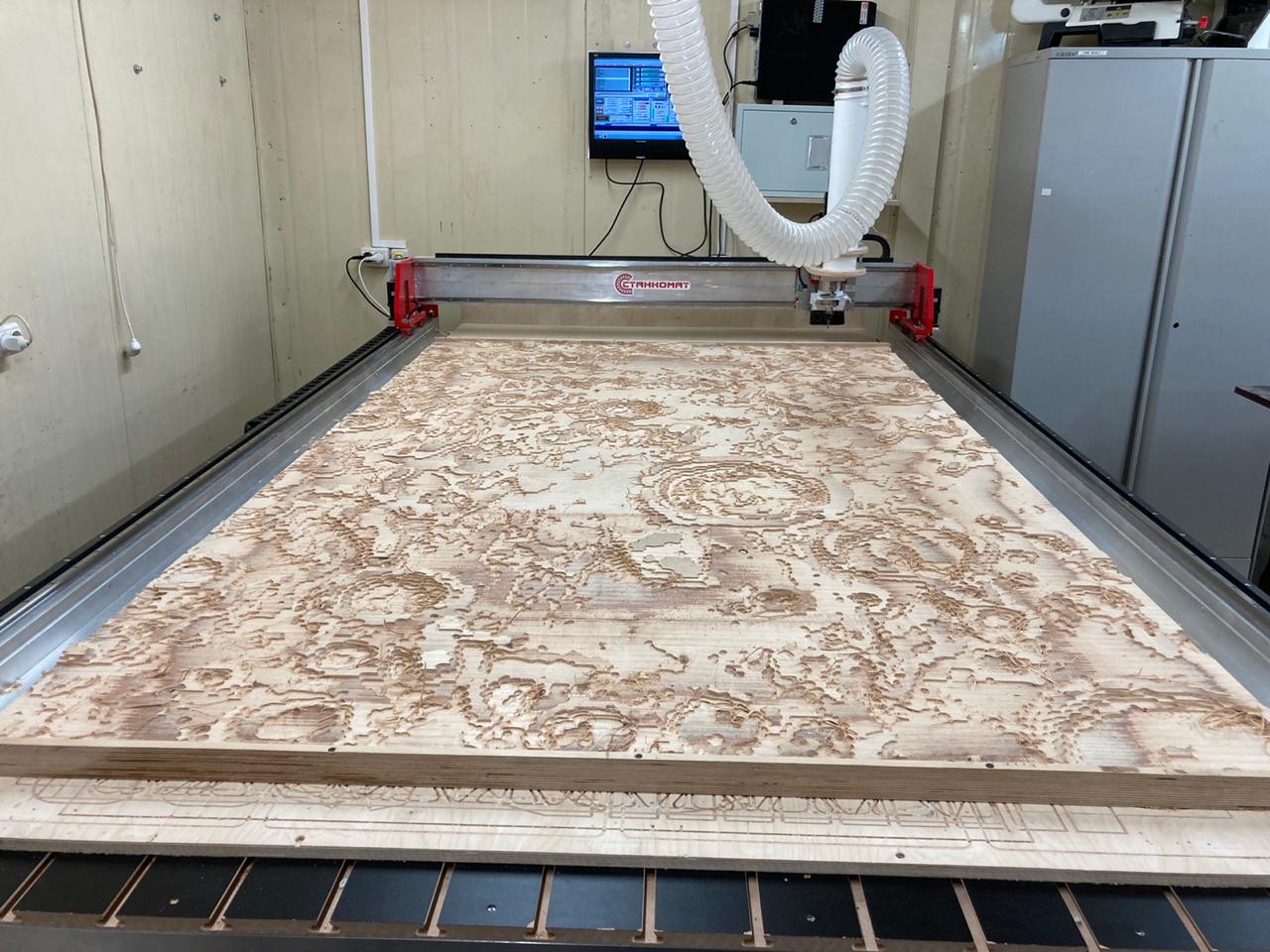
Следующая присланная работа. Автор неизвестен, прислал изготовитель станков "Станкомат" . Изготовление панно части поверхности луны. Панно имеет размер 1,5х2,5м. Размер поля станка 1,5х3м. Рисунок взят со слайда части поверхности луны, который сделан спутником ЛРО постоянно сканирующим поверхность луны (NASO).
Стоимость слайда порядка $200. В NASO каждый может купить такой слайд )) Стоимость заготовки толстой высококачественной фанеры 25тыс руб. Это не строительная фанера, которая имеет пустоты между слоями.
Работа контроллера К460. Деление шага 16, удержание отключено. ток на моторах 4А, блок питания 48В. Фреза шаровидная, 1мм, шаг фрезеровки 0,1мм. Черновая обработка - 8 часов, Чистовая обработка - 40 часов, беспрерывно! Это говорит о том, что контроллер К460 запросто работает 2 суток без малейшего пропуска шага (хотя были работы которые выполнялись 2 недели без малейшего пропуска шага). Станок был подключен через мощный промышленный источник бесперебойного питания, на случай отключения света или на случай сетевых помех, что бы не испортить дорогую заготовку. Конечная цена изделия панно поверхности луны - 150 тыс руб.





Еще одна работа К460. Прислал изготовитель станков "Станкомат". Фрезеровка циферблата для часов, фанера 35 мм, между заготовками циферблатов расположены детали для подсвечников. Управление Mach3.


Далее будет размещена Ваша присланная работа ! (с Вашего разрешения)